Itinéraires en transit rigide (Solution classique dite mécanique)
Réalisation pratique
Dans les deux premiers articles consacrés aux itinéraires, nous avons successivement traité la définition et les généralités puis la réalisation des tableaux d’itinéraires et d’incompatibilité, travail préalable à la mise en place d’automatismes pilotant la gestion des itinéraires dans EEP. Avec ce nouvel article, nous entrons dans le cœur du sujet avec la réalisation concrète d’un automatisme.
Adepte d’EEP depuis quasiment ses débuts j’ai vu assez rapidement tout l’intérêt qu’offrait l’utilisation d’un mobile pour exécuter certaines tâches. L’idée de construire moi-même mes automatismes m’est donc venue à l’esprit d’autant que les réseaux ou « Anlagen » commercialisés par Trend© montraient aussi que la gestion des trains pouvait s’appuyer sur l’utilisation d’un ou plusieurs mobiles. Par la suite sont apparus les « schaltautos » que l’on peut appeler commutateurs mobiles en français : CM. Leur utilisation est devenue particulièrement intéressante quand de nouvelles fonctionnalités furent intégrées dans les fenêtres de programmation des contacts de voie pour véhicules (Fahrzeug).

La figure ci-dessus présente quelques modèles de commutateurs mobiles que l’on pourra charger à partir de la fenêtre de contrôle : Matériel roulant/Route/Véhicules routiers. La bibliothèque propose plusieurs modèles. D’un point de vue strictement fonctionnel, ils ne présentent aucune différence les uns par rapport aux autres. Leur unique différence réside dans leur aspect visuel.
En particulier, deux fonctionnalités ont offert un intérêt majeur pour les automatismes mécaniques :
- La possibilité de modifier la route d’un matériel roulant,
- Le déclenchement conditionnel d’une action en fonction de l’état d’un signal ou aiguillage.
La combinaison de ces deux fonctionnalités permet aujourd’hui la construction d’automatismes performants et fiables.
Depuis, l’intégration de la programmation en langage Lua a permis un nouveau pas technologique dans le développement des automatismes. Toutefois, le modèle mécanique qui est resté pendant quelques années le seul possible à utiliser dans EEP demeure aujourd’hui encore un outil puissant pour assurer le pilotage d’automatismes complexes. Il ne nécessite pas, en dehors d’une bonne dose de sens logique, de connaissances particulières à la différence de Lua qui exige pour celui qui n’a pas la moindre notion dans le domaine du langage de programmation informatique, un travail d’acquisition plus ou moins long selon ses aptitudes.
Passionnés de modélisme virtuel et d’EEP en particulier, nous n’avons pas pour autant tous vocation à être ou devenir des experts programmeurs. EEP de par sa conception est une source de loisirs inépuisable qui peut répondre à tous les goûts, l’aspect technique n’étant qu’une approche possible parmi d’autres. C’est pourquoi j’ai pensé utile pour ceux qui ne souhaitent pas s’investir dans l’apprentissage de la programmation Lua, de publier des articles sur les automatismes mécaniques c’est à dire sur les automatismes fonctionnant uniquement avec des commutateurs mobiles et des contacts de voie.
Dans le domaine des automatismes on peut distinguer 3 modèles possibles :
- Les automatismes dits « mécaniques »
- Les automatismes intégralement numériques pilotés en langage LUA
- Les automatismes mixtes mécaniques et numériques.
De même, dans l’article TCO et tableaux d’incompatibilité, j’ai précisé que la gestion des itinéraires pouvait s’effectuer selon deux modes :
- Le mode de gestion à transit rigide ou PRA,
- Le mode de gestion à transit souple ou PRS.
Principes et structure
Principe
Le fonctionnement d’un automatisme dit mécanique repose exclusivement sur la présence d’un ou plusieurs objets roulants agissant sur des contacts de voie. C’est pour cette raison que je l’ai appelé automatisme « mécanique » pour le distinguer des automatismes entièrement pilotés par un programme informatique en langage LUA. Le schéma théorique (figure n° 1) ci-dessous, nous montre le principe de fonctionnement avec les liens entre l’automatisme et la voie :

Structure de l’automatisme
L’automatisme est constitué de 2 éléments composés d’une part d’une structure statique et d’autre part d’un mobile ou élément dynamique en mouvement permanent.
La structure statique
La structure statique se compose elle-même de 3 éléments :
- Une voie en support statique pour permettre le déplacement du mobile agissant sur les itinéraires,
- Des contacts sur cette même voie en support statique,
- Des signaux indiquant un état logique.
L’ ensemble voie, contacts de voie et signaux constitue le support statique.
L’ interaction entre les signaux, les contacts de voie et le mobile assure la réalisation des différentes phases de la vie d’un itinéraire.
Il est temps maintenant de faire appel à nos connaissances théoriques. Rappelez-vous les différentes phases de la vie d’un itinéraire telles que nous les avons vues dans la première partie (Etapes de la vie d’un itinéraire) :
- L’appel d’itinéraire
- La vérification de compatibilité avec d’autres itinéraires
- La mise en attente (le cas échéant)
- L’enclenchement et établissement d’itinéraire
- L’exécution de l’itinéraire
- La destruction d’itinéraire.

La voie
La figure n° 2 ci-dessus nous montre la structure de l’ensemble statique. Chaque ligne correspond à un itinéraire, la ligne 1 étant affectée à ITN 1, la seconde ligne à ITN 2 et ainsi de suite. Le schéma ne montre que 8 itinéraires alors que dans notre modèle nous avons dénombré 12 itinéraires (voir article n° 2). Je me suis limité aux 8 premiers itinéraires pour des questions pratiques mais il est bien évident que notre automatisme complet devra afficher 12 lignes d’itinéraires.
La voie permet au mobile de se déplacer et constitue le support des nombreux contacts qui vont piloter la vie des itinéraires. Personnellement j’utilise comme voie support les voies pour tramway en version invisible (elles apparaissent sous le nom d’unsichtbar en allemand). L’ automatisme n’ayant pas pour vocation d’être visible, il est préférable de choisir chaque fois que cela peut se faire du matériel invisible pour limiter le poids total du fichier projet et la charge de calcul de l’ordinateur.
Chaque ligne est segmentée en 5 tronçons qui correspondent chacun à une des 5 phases de la vie d’un itinéraire. Il manque seulement la phase de mise en attente. Ce n’est pas un oubli mais nous verrons plus bas comment la phase de vérification conditionne l’enclenchement de l’itinéraire demandé ou assure à l’inverse la mise en attente.
Dans la partie droite de chaque ligne nous voyons la présence de 2 signaux. Le premier est appelé signal d’appel d’itinéraire ou SAI. Il permet au mobile de comprendre qu’une demande d’établissement d’itinéraire est demandée.
Le second est appelé signal d’enclenchement d’itinéraire ou SEI. Il assure le verrouillage de l’itinéraire et interdit toute ouverture d’itinéraire non compatible avec celui enclenché.
Le rappel de la figure n° 1 nous montre la localisation des contacts SAI et SEI respectivement en amont et en aval de la zone d’itinéraire.
Les contacts de voie
Les contacts de voie sont au cœur du fonctionnement de l’automatisme. Trois types de contacts sont utilisés :
- Les contacts pour signaux,
- Les contacts pour appareils de voie (Aiguilles ou TJD),
- Les contacts pour véhicules.
Les contacts sont parfois regroupés dans des groupes de contacts pour obtenir un dispositif plus ramassé mais aussi pour plus de clarté.
Les signaux
Le rappel de la figure n° 2 montre sur la partie droite de chaque ligne d’itinéraire deux signaux. Prenons la ligne ITN 1. Nous voyons 2 signaux (ID 101 et ID 111). Ces signaux sont des modèles invisibles à 2 états seulement (ouvert ou fermé). Le premier sur chaque ligne d’itinéraire est le signal d’appel d’itinéraire (SAI).
Comme nous l’avons vu dans le schéma théorique, le contact qui commande la fermeture de ce signal est placé sur la voie ferrée à une distance suffisante de la zone d’itinéraire. Il est actionné par le train qui ferme le signal à son passage. Le commutateur mobile (CM) saura alors qu’un itinéraire est demandé comme nous le verrons tout à l’heure.
Information : désormais, nous appellerons le commutateur mobile (CM) Commutateur Mobile d’Itinéraires (CMI) compte tenu de sa fonction précise dans le déclenchement des itinéraires.
Le deuxième signal identique au premier, appelé signal d’enclenchement d’itinéraire ou SEI est également un signal invisible à 2 états. Il est activé par le commutateur mobile comme nous le verrons plus bas. A l’état fermé (Arrêt), il verrouille l’itinéraire et interdit toute programmation d’un itinéraire incompatible. Ainsi lorsque le SEI 111 (voir figure n° 2 en haut à droite) est activé il verrouille l’ITN 1 jusqu’à sa destruction. Il interdit la programmation des ITN 2, 4, 5, 6, 7 et 9 comme nous l’avons vu dans le tableau des incompatibilités (Itinéraires 2ème partie – Fig 11).
Les signaux SAI et SEI doivent être considérés comme indiquant des états logiques, ni plus ni moins.

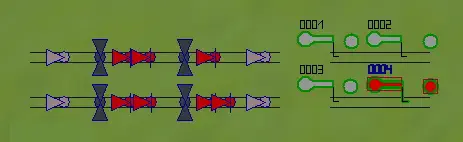
La figure n° 3 ci-dessus montre les SAI de l’itinéraire n°2 et SEI de l’itinéraire n° 4, tels qu’ils apparaissent dans la fenêtre de l’éditeur d’objets 3D d’EEP. Ceux-ci sont à l’état fermé, ce qui signifie que ITN 2 est demandé mais que cet appel reste en attente. SEI 4 indique que ITN 4 est en cours d’exécution. Cet itinéraire est verrouillé.
Le mobile
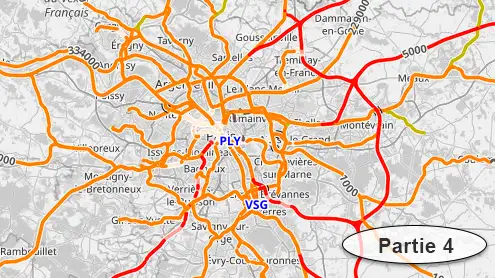
Dans la figure n° 4 ci-dessous l’encadré violet montre la position du mobile ou commutateur mobile d’itinéraires (CMI). Celui-ci est en mouvement permanent et parcourt la structure statique de gauche à droite et de haut en bas dans un cycle sans fin :

N’importe quel mobile de la bibliothèque des matériels roulants peut être utilisé. Vous pouvez prendre un avion si cela vous chante. Peu importe. Le seul impératif est que le mobile puisse circuler à très grande vitesse afin de permettre la réactivité la plus élevée possible. Les schaltautos circulent à 400 km/h ce qui constitue à ma connaissance la vitesse maximale des objets mobiles dans EEP, même pour un Airbus par exemple.
Néanmoins comme pour la voie, il est judicieux de choisir de préférence un « schaltauto » en raison de son faible poids en octets. Il ne faut pas oublier que les contacts de voie pèsent lourd au total dans le poids d’un fichier projet. Comptez en moyenne 1.5 ko pour chaque contact. Vous verrez plus bas que l’automatisme que nous allons réaliser nécessite beaucoup de contacts. C’est pourquoi le souci de l’économie dans la taille des objets insérés doit être constant. Il est préférable de consommer les kilo-octets dans la réalisation du décor qui constitue une partie importante et hautement attractive dans un réseau.
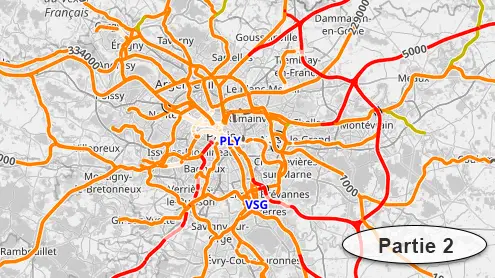
La figure n° 5 ci-dessous nous montre le parcours du CMI qui balaye la totalité de l’ensemble statique. Les flèches en pointillé jaune montrent le parcours du CMI. Volontairement je n’ai pas matérialisé la totalité du parcours effectué par le commutateur pour ne pas surcharger inutilement le schéma et me suis arrêté à l’étape 8. Toutefois pour que le dispositif soit clair j’ai matérialisé par une flèche bleu foncé le saut retour vers la ligne n°1. Les flèches vous renseignent dans le même temps sur les connections virtuelles qui doivent être établies pour sauter d’une ligne d’itinéraire à la suivante.

Deux remarques s’imposent :
- Le commutateur mobile ne passe pas sur les voies qui portent les signaux SAI et SEI. Cela ne présenterait aucun intérêt et serait même contre-productif car le trajet du mobile serait allongé et donc augmenterait le délai de réactivité.
- Il est possible de diminuer davantage le temps de parcours du mobile en supprimant sur chaque ligne les intervalles séparant les phases. Il n’y a alors qu’un seul segment beaucoup plus court par ligne d’itinéraire ce qui réduit d’autant le délai de réactivité de l’automatisme.
L’élément statique présente alors une configuration beaucoup plus ramassée comme le montre la figure n° 6 ci-dessous :
Toutefois pour les débutants, je conseille vivement la forme segmentée pour éviter les erreurs toujours possibles.
Le commutateur mobile doit afficher un des 5 itinéraires que vous aurez préalablement déclarés dans l’éditeur prévu à cet effet et qui se trouve dans le menu déroulant « Itinéraires » ou « Routen » pour la version allemande dans la barre de menu.
Les routes (itinéraires) énumérées ci-dessous constituent les phases propres au CMI et conditionnent les phrases de la vie des itinéraires :
- APPEL,
- VERIFICATION,
- ENCLENCHEMENT,
- ATTENTE,
- NEUTRE.
Important : Les cinq itinéraires prévus pour le CMI constituent en fait l’état dans lequel le mobile doit se trouver pour agir sur les contacts. Ce type d’itinéraire ne doit pas être confondu avec l’itinéraire des trains.
Je recommande de numéroter les routes comme je l’ai fait ci-dessus, pour pouvoir les retrouver plus facilement en tête de la liste dans le menu déroulant. Sans numérotation, les états du commutateur mobile seront ventilés par ordre alphabétique parmi les autres routes que vous aurez créées pour vos trains ou véhicules routiers.
Nous appellerons désormais « état » du CMI ce qui apparaît comme sélection d’itinéraire dans la fenêtre de sélection, le terme d’itinéraire devant être strictement réservé aux trains eux-mêmes pour éviter tout risque de confusion.
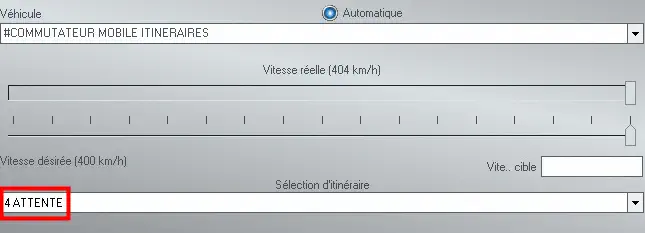
Dans la figure n° 7 ci-dessus, le commutateur est à l’état « 4 ATTENTE », ce qui signifie qu’un train en approche a demandé un itinéraire mais que cette demande n’a pas été prise en compte, un autre itinéraire incompatible avec celui demandé étant en cours d’exécution.
Cette figure nous donne un cliché d’un CMI à l’état « ATTENTE ». On remarquera que la vitesse instantanée au moment de la capture d’écran était de 404 km/h. En fait, la vitesse oscille sur le parcours entre 398 et 404 km/h.
Construction de l'automatisme
Ligne d’itinéraire
Dans la figure n° 4, nous avons vu l’automatisme de gestion des itinéraires dans son ensemble. Il nous faut maintenant entrer dans le détail de chaque ligne d’itinéraire.

Nous avons dans la figure n° 8 ci-dessus, les lignes des itinéraires 1 et 2 de notre réseau. Rappelons-nous que ITN 1 correspond à l’itinéraire PARIS MARSEILLE VIA VOIE 2 et ITN 2 à PARIS MARSEILLE VIA VOIE 3.
Nous pouvons voir ici que la ligne d’itinéraire est segmentée et que chaque tronçon correspond à une phase de la vie d’un itinéraire. Nous allons procéder pas à pas dans l’ordre chronologique.
L'appel
L’ appel est opéré par un train en approche qui actionne un contact du signal d’appel d’itinéraire ou SAI placé sur la voie.
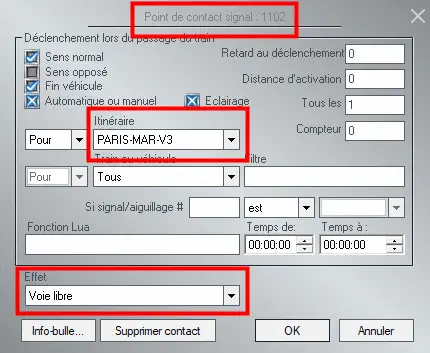
Prenons l’exemple de ITN 2. Le contact est programmé comme le montre la figure n° 9 ci-dessous :
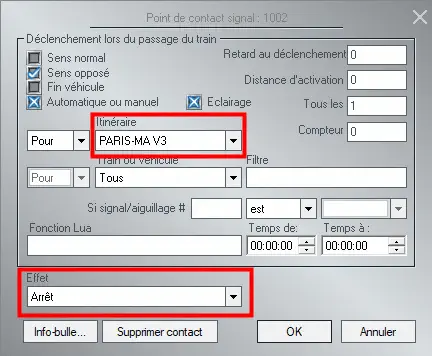
La fenêtre Itinéraire indique PARIS-MA V3. Il s’agit de la route programmée dans le menu itinéraires. Tout train dont l’itinéraire sera PARIS-MA V3 agira sur le contact et provoquera la fermeture du signal 1002 qui est un signal d’appel d’itinéraire. A contrario un train programmé PARIS-MA V2 n’agira pas sur ce contact mais provoquera la fermeture du SAI 1001.
La figure n° 10 nous montre les 3 contacts SAI agissant pour ITN 1, ITN 2 et ITN 6 :
- ITN 1 – PARIS MARSEILLE VOIE 2
- ITN 2 – PARIS MARSEILLE VOIE 3
- ITN 6 – PARIS GRENOBLE VOIE 3
En règle générale les contacts SAI seront regroupés sur un même point de la voie d’approche.
Personnellement je repère ces contacts par un cercle formé par des voies de tramways invisibles en 3D, mais qui permet de vite localiser leur emplacement en fenêtre 2D.
Voyons maintenant pas à pas comment va se faire l’appel. Au départ la situation est la suivante (Fig 11) :

Aucun train n’est en approche. Aucun itinéraire n’est demandé ou en cours d’exécution aussi bien pour ITN 1 que pour ITN 2. Tous les signaux SAI et SEI sont donc au repos.
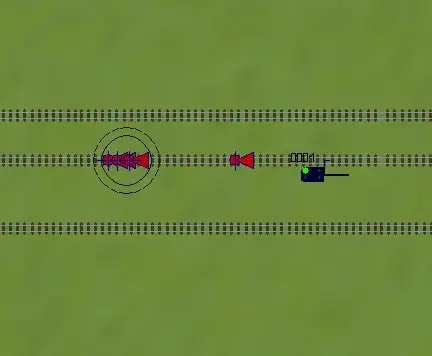
A la figure n° 12, un train vient de franchir la zone des contacts d’itinéraires. Ce train est programmé PARIS-MARSEILLE VOIE 3. Cet itinéraire correspond à ITN 2 dans notre nomenclature. Il a donc actionné le contact SAI 1002 faisant basculer ce signal à l’état fermé. Pendant ce temps le commutateur mobile d’itinéraires ou CMI balaye la structure statique de l’automatisme.

Lorsque celui-ci va entrer dans la zone d’appel de la ligne d’ITN 2 le contact va agir sur lui du fait de sa programmation. Ce contact est du type véhicule :

Le CMI entre sur la ligne d’itinéraire ITN 2 à l’état « 5 NEUTRE ». Nous verrons au chapitre L’ établissement et l’exécution d’itinéraire plus bas dans cet article, comment et pourquoi le CMI affiche cet état à l’entrée de la ligne d’itinéraire.
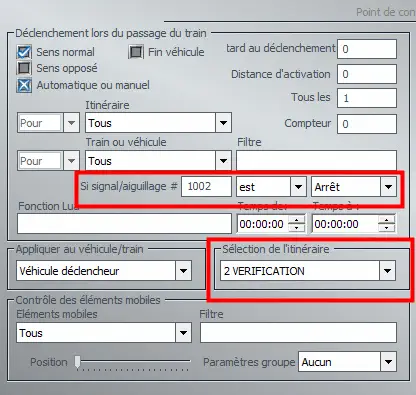
Le contact sur le segment appel de la ligne est programmé avec une condition. Le premier encadré rouge précise que si 1002 est à l’état arrêt alors le CMI prendra l’état 2 VERIFICATION comme il est indiqué dans le second encadré.
Comme le SAI 1002 a été mis à l’état « arrêt » ou fermé, comme on voudra, la route du CMI bascule de l’état 5 NEUTRE à celui de 2 VERIFICATION. Notons au passage que la fenêtre de condition « Itinéraire » indique « Tous ». Pour plus de rigueur logique nous aurions pu mentionner « 5 NEUTRE ». Cependant comme le CMI reprend l’état neutre à chaque sortie de ligne d’itinéraire préciser ce point ne change rien et ne crée pas une sécurité supplémentaire.
Pour bien nous concentrer sur la succession des étapes et la programmation des contacts, je ne développe pas ici la question de l’implantation des contacts d’appels SAI qui doivent être placés de façon judicieuse sur la voie. Cette question sera abordée plus loin.
La vérification de compatibilité
La vérification comprend deux étapes :
- La vérification proprement dite,
- La validation de la demande d’itinéraire dès lors qu’aucun autre itinéraire incompatible n’est en cours d’exécution.
Le tableau des incompatibilités nous indique que ITN 2 est incompatible avec les itinéraires suivants, soit au total 11 itinéraires :
ITN 1 - ITN 2 - ITN 4 - ITN 5 - ITN 6 - ITN 7 - ITN 8 - ITN 9 - ITN 10 - ITN 11 - ITN 12
Les contacts de type véhicule qui vont permettre de vérifier si un itinéraire incompatible avec celui demandé est en cours d’exécution sont regroupés précisément dans des contacts appelés « Groupes de contacts » comme indiqué ci-dessous par la flèche rouge :

Ce groupe de contacts contient autant de contacts « véhicule » qu’il y a d’itinéraires incompatibles. Nous aurons donc ici 11 contacts assurant la vérification.

Cette vue partielle de la fenêtre groupe de contacts ITN 2 nous montre bien qu’il y a 11 contacts. Voyons maintenant comment chaque contact est programmé.
J’ai pris ici à titre d’exemple le contact assurant la vérification avec l’ITN 5. Cette vérification s’opère par rapport au signal d’enclenchement d’itinéraire ou SEI. Rappelons-nous que ce signal assure l’enclenchement d’un itinéraire en assurant sa protection durant toute la phase d’exécution. S’agissant de l’ITN 5 la vérification s’effectue sur le SEI 1105.
Les autres contacts sont programmés de façon identique sauf le fait bien sûr que pour ITN 1 la condition s’appliquera au SEI 1101 ou au SEI 1110 pour ITN 10.

Ainsi nous observons que si un ITN est en cours d’exécution son SEI sera fermé (arrêt) et fera basculer l’état du CMI de 2 VERIFICATION à 4 ATTENTE.
La vérification proprement dite étant effectuée, à supposer qu’aucune incompatibilité n’ait été détectée il y a lieu de valider la demande d’itinéraire pour la rendre exécutable.
C’est la fonction du contact repérée dans la figure 18 par la flèche rouge :

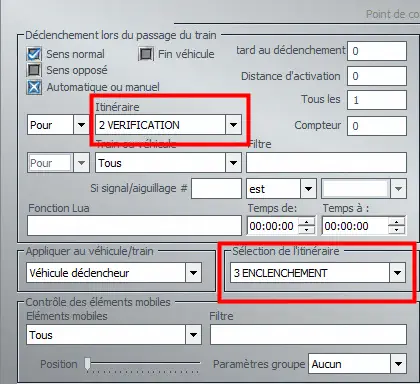
La fenêtre de programmation de ce contact type « véhicule » montre que si le CMI est à l’état 2 VERIFICATION alors il peut prendre l’état 3 ENCLENCHEMENT qui lui permettra d’agir à la phase suivante comme nous le montre la figure 19 :
A l’inverse nous avons vu que dans la phase de vérification proprement dite, la détection d’une incompatibilité ayant fait basculer le CMI à l’état 4 ATTENTE, celui-ci ne pourra pas commuter vers l’état 3 ENCLENCHEMENT qui valide la demande d’itinéraire.
L'enclenchement
L’ enclenchement est la phase de la vie d’un itinéraire par laquelle :
- Toute programmation d’un autre itinéraire sera interdite,
- L’exécution de l’itinéraire est rendue possible.
L’ enclenchement est réalisé par la fermeture du signal d’enclenchement d’itinéraire. Dans notre cas avec ITN 2 cet enclenchement est opéré par la fermeture du SEI 1102. Dès lors qu’un ITN est validé, il importe que l’enclenchement se fasse le plus rapidement possible pour éviter qu’entre-temps un autre itinéraire ne soit programmé.
La figure 20 ci-dessous nous montre quels éléments de l’automatisme sont mis en œuvre au cours de cette phase :

A noter que dans un dispositif plus ramassé comme celui montré dans la figure n° 6 plus haut, le contact SEI serait quasiment accolé juste après le contact véhicule faisant basculer le CMI à l’état enclenchement.
La figure 21 ci-dessous, montre la programmation du contact SEI de l’ITN 2.

Nous voyons bien que pour que ITN 2 soit verrouillé, la condition nécessaire est que le CMI soit à l’état 3 ENCLENCHEMENT. Nous avons vu plus haut que si un itinéraire incompatible avec ITN 2 avait été en cours d’exécution, le CMI aurait pris l’état 4 ATTENTE. Il n’aurait donc pas pu ici agir sur le SEI 1102.
Une fois SEI 1102 fermé, ITN 2 est protégé pour toute la durée de son exécution.
Comme ITN 2 est maintenant actif, la fonction appel assurée par le SAI1002 n’a plus de raison d’être. C’est pourquoi il convient dans la foulée de faire retomber ce signal à l’état repos.

La figure n° 22 ci-dessus montre quels sont les éléments qui entrent en jeu pour mettre fin à la demande d’itinéraire. Cette opération est réalisée par le CMI sur le contact SAI 1002.

Comme pour l’enclenchement, la suppression de la demande d’établissement de l’ITN 2 ne peut être effectuée que si le CMI est à l’état 3 ENCLENCHEMENT. Cela signifie que si le CMI au sortir de la phase vérification est à l’état 4 ATTENTE, il ne peut faire retomber le SAI 1002.
La demande d’itinéraire est maintenue et lorsque le CMI se présentera à nouveau sur le segment appel de ITN 2 le cycle recommencera comme nous l’avons vu plus haut et ce autant de fois que ITN 2 ne pourra être autorisé pour cause d’incompatibilité.
L’établissement et l’exécution d’itinéraire
Nous voici maintenant dans la phase qui va permettre au train de parcourir l’itinéraire demandé. Deux temps doivent être distingués :
- L’établissement consiste à positionner correctement tous les appareils de voie de l’itinéraire concerné et éventuellement de commuter les signaux intermédiaires entre le point d’entrée de l’itinéraire et son point de sortie,
- L’ exécution consiste à autoriser l’entrée du train sur l’itinéraire en ouvrant le signal d’entrée de l’itinéraire.
Les contacts actionnant les aiguillages sont tous regroupés dans le groupe de contact comme le montre les figures 24 et 25. Remarquons au passage la position des signaux SAI 1002 et SEI 1102. Cette configuration demeura ainsi pendant toute la durée de l’exécution de ITN2, sauf si un second convoi se présenterait en demandant à son tour d’entrer sur ITN2. Dans ce cas le SAI 1002 basculerait à l’état fermé mais la demande serait mise en attente puisque ITN 2 est incompatible avec lui-même.

Pour programmer cette phase il suffit de prendre un à un les appareils de voie et de programmer leur direction, soit en tracé direct (Branche principale) soit en tracé dévié (Embranchement).

Notons que la condition 3 ENCLENCHEMENT doit être impérativement inscrite dans la fenêtre de programmation du contact d’aiguillage faute de quoi, nous aurions inévitablement des fonctionnements intempestifs.
A titre d’exemple, le contact de l’aiguille Ag 303 à la sortie de la voie 3 est bien programmé pour permettre au train d’accéder à la voie 2 en direction de Marseille. La condition 3 ENCLENCHEMENT est bien mentionnée :

L’exécution proprement dite ou l’ouverture des signaux d’itinéraire appelle ici quelques remarques.
Le TCO = Tableau Contrôle Optique (Voir la figure n° 5 dans le 2ème article, TCO et tableaux d’incompatibilité) nous montre sur le tracé de ITN 2 la présence de 3 signaux :
dans le 2ème article, TCO et tableaux d’incompatibilité) nous montre sur le tracé de ITN 2 la présence de 3 signaux :
- S 21 en entrée de ITN 2 sur la voie 2
- S 34 en sortie de gare sur la voie 3
Or la figure n° 27 ci-dessous, matérialise dans le cadre rouge la présence de 3 contacts de signaux, en l’occurrence S 20 – S 21 – S 34. Sans trop entrer dans la question de la signalisation SNCF il convient de savoir que S 21 qui est le signal d’entrée de ITN 2, est un signal avec rappel de ralentissement.

Dans le cas présent, ITN 2 aiguille le train sur la voie 3 donc en position en tracé dévié avec ici un ralentissement à 30 km/h. Le signal 21 à la figure n° 28 affiche bien le ralentissement à 30 km/h. Néanmoins ce signal est précédé d’un signal d’annonce de ralentissement à feux jaunes horizontaux dans le canton précédent. Il ne figure donc pas sur le TCO. Néanmoins il convient de le programmer en cohérence avec S 21.

S 21 affiche ici le ralentissement à 30 km/h pour autoriser le franchissement des appareils de voie en position déviée.
Le signal ici est du type rappel de ralentissement 30 km/h (feux fixes) ou 60 km/h (feux clignotants) équipé d’une cible type G à 5 feux dans la partie gauche. Il existe une cible H ayant les mêmes fonctionnalités mais affichant 6 feux dans sa partie gauche.
Le signal à droite est situé à la sortie du canton précédent soit environ 1,5 km avant S 21. Il doit être programmé en annonce ralentissement comme le montre le cliché 30.
Ce signal est du type E à 5 feux et comme pour les signaux de rappel de ralentissement il existe un modèle de type F à 6 feux.
Les signaux E et F affichent eux aussi soit 2 feux fixes pour un ralentissement à 30 km/h, soit 2 feux clignotants pour un ralentissement à 60 km/h :

La figure n° 30 indique la programmation du signal d’entrée d’ITN 2. Il importe de retenir que seul l’état 3 ENCLENCHEMENT autorise cette programmation :

Les différents signaux implantés sur l’itinéraire devront impérativement respecter cette condition.
Destruction de l’itinéraire
Dans cette dernière phase, le segment est appelé segment de destruction comme cela est mentionné plus haut dans la figure n° 8
A proprement parler il ne s’agit pas de la destruction de l’itinéraire mais plutôt de la destruction de la programmation telle qu’elle a été réalisée tout au long du parcours du CMI sur la ligne ITN 2. Au moment ou le mobile aborde le segment destruction il peut être soit à l’état « 3 ENCLENCHEMENT », soit à celui de « 4 ATTENTE » soit encore à celui de « 5 NEUTRE ». Si le CMI est à l’état neutre il n’y aura, évidemment, aucun changement. La présence de ce contact en fin de ligne d’itinéraire explique maintenant pourquoi le CMI se présente toujours à l’état 5 NEUTRE à l’entrée de chaque ligne d’itinéraire.
La figure n° 31 ci-dessous matérialise l’emplacement du contact véhicule assurant la remise du CMI à l’état 5 NEUTRE :

Il serait beaucoup plus dangereux pour la gestion des itinéraires que le CMI garde sa dernière programmation active en dehors du neutre car elle pourrait avoir une action intempestive dans les lignes d’itinéraires suivantes. C’est la raison pour laquelle existe l’état NEUTRE. Aucune action n’est possible avec cet état hormis l’appel d’itinéraire au segment 1.
La destruction d’itinéraire qui libérera ITN 2 et rendra possible l’établissement d’un autre ITN en attente se fera par l’arrière du train lorsque celui-ci quittera la zone de transit d’ITN 2. Nous avons vu plus haut que la protection des itinéraires est assurée par les SEI. Dans le cas présent SEI 1102 est actif et donc il y a lieu de le faire basculer à l’état repos. Le contact signal dans l’encadré rouge assure la remise de SEI 1102 à l’état repos. Pour des questions pratiques j’ai matérialisé les positions des contacts de destruction par des croix invisibles en fenêtre 3D :

L’action, par l’arrière du train, de remise de SEI 1102 à l’état repos termine le cycle complet de la vie d’ITN 2 depuis l’appel.
La figure 33 nous montre la programmation du contact de destruction de ITN 2 au sortir de la zone de transit :
Il est important que la fenêtre itinéraire soit bien renseignée. Le SEI 1102 ne concerne que ITN 2 donc uniquement les trains programmés PARIS-MARSEILLE par la voie 3. Ne pas fixer cette contrainte entraînerait des fonctionnements intempestifs car d’autres itinéraires sortent par la voie 2 avec pour effet la présence des contacts de destruction d’autres itinéraires comme ceux d’ITN 1 et ITN 9 au même emplacement.
Positionnement des contacts sur la voie ferrée
Deux contacts sont positionnés sur la voie ferrée :
- Le contact d’appel d’itinéraire du SAI,
- Le contact de sortie d’itinéraire du SEI.
Pour garantir un fonctionnement sans incident il convient de respecter quelques règles.
Positionnement des SAI
Appel de pleine voie avec un signal d’entrée ITN équipé d’un panneau de type B
Un train en approche d’itinéraire doit appeler au plus loin l’ITN demandé :

Le contact SAI dans ce cas de figure doit être placé juste à la sortie du canton précédent, soit entre 1,5 et 2 km en fonction de la longueur du canton. Il s’agit ici des cantons à block automatique lumineux (BAL) qui équipent les lignes à trafic ferroviaire important. Sur les lignes à trafic réduit (Block a permissivité restreinte ou BAPR) le contact peut être placé beaucoup plus loin.
Important : La règle à respecter est de veiller à ce qu’aucun signal de block automatique ne soit intercalé entre le contact de voie et le signal ITN qui ouvre l’accès à l’ITN.
Appel de pleine voie avec un signal d’entrée ITN équipé d’un panneau de type G ou H
Nous avons vu plus haut qu’il existe différents types de signaux affichant le ralentissement ou le rappel de ralentissement.
Rappelons que les panneaux de type G ou H sont dotés de feux de ralentissement à 30 ou 60 km/h pour le franchissement des zones d’aiguillages. Ces signaux sont précédés d’un signal avec panneau de type E ou F annonçant le ralentissement.
La figure n° 35 ci-dessous indique la position du contact de voie du signal d’appel d’itinéraire. Nous voyons que ce contact est placé 2 cantons avant le signal d’entrée d’itinéraire. Bien entendu les signaux ont été disposés ici de façon très rapprochée pour bien visualiser le schéma général. En fait les signaux sont distants l’un par rapport à l’autre d’une distance de 1,5 km en moyenne, distance qui correspond à la longueur moyenne d’un canton.
Lors de la phase » 3 ENCLENCHEMENT » le CMI commute le signal d’entrée ITN à l’état ralentissement 30 ou 60 km/h selon l’itinéraire programmé. Un lien logique entre le signal de rappel ralentissement et le signal d’annonce de ralentissement fait basculer ce signal d’annonce à l’état ralenti 30 ou 60 km/h selon le cas de figure.

Les signaux E et F présentent la même physionomie avec les feux d’annonce de ralentissement placés horizontalement. La différence entre les panneaux E et F tient au nombre de feux sur la partie verticale de la cible. Dans notre cas présent cette différence n’a aucune importance.
Bien sûr il en est de même pour les signaux G qui disposent de 5 feux verticaux et H équipés quant à eux de 6 feux verticaux.
Pour info cette différence s’explique par la présence ou l’absence du feu de manœuvre.
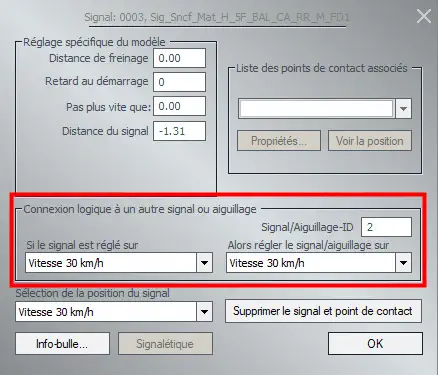
La figure n° 36 nous indique que le signal n° 3 d’entrée d’itinéraire est couplé avec le signal précédent. Il convient d’établir les connexions logiques adéquates pour que les états du signal d’annonce type E ou F soient bien corrélés à ceux du signal d’entrée d’itinéraire :
Une autre solution consiste à placer un contact de voie du signal d’annonce sur chaque segment « Enclenchement » des itinéraires concernés et le programmer pour permettre l’affichage du ralenti au passage du commutateur mobile.
Appel d’itinéraire depuis une gare
Ici, nous anticipons quelque peu sur le transit souple que nous étudierons dans le prochain article consacré aux itinéraires.
Dans la programmation des itinéraires en transit rigide du modèle que nous avons étudié, on peut observer que si un train marque un arrêt en gare il verrouille son ITN pendant toute la durée de son arrêt et interdit pendant ce temps toute programmation d’un autre itinéraire incompatible. Nous verrons plus en détail comment fluidifier le trafic ferroviaire dans la construction des itinéraires souples.
Ce qui nous intéresse ici c’est avant tout le bon positionnement des contacts d’appel d’itinéraires.
La figure n° 37 nous montre la localisation d’un contact de signal d’appel d’itinéraire dans la zone d’arrêt des trains à quai sur la voie 3 de notre gare de passage.
Il ne restera plus qu’à programmer le contact avec un retard au déclenchement égal à la durée de l’arrêt en gare.
Dans ce cas de figure le signal d’entrée d’itinéraire est le signal 34 qui autorisera le départ du train une fois l’ITN enclenché et établi.

Positionnement des SEI
La libération ou destruction d’un itinéraire enclenché ne peut se faire que lorsque l’arrière du train a quitté la zone de transit d’itinéraire.
Le schéma ci-dessous de la figure n° 38 montre un positionnement correct du contact permettant la retombée du signal d’enclenchement d’itinéraire :

Ce schéma nous montre que la protection de l’itinéraire est parfaitement assurée. Nous supposons que le train 2 était en attente d’entrée sur l’itinéraire occupé par le train 1. Ce train 1 a franchi le signal BAL et l’a placé au rouge assurant ainsi sa protection sur l’arrière puis il a actionné le contact du SEI (Signal d’enclenchement d’itinéraire), placé en ZC, faisant retomber le SEI au repos. Le train 2 qui avait demandé de pénétrer sur l’itinéraire voit alors sa requête prise en compte. Le signal d’entrée de l’ITN passe au vert comme nous l’indique la figure 39. Toutefois, si ce train ne marque pas l’arrêt dans notre gare de passage il ne pourra pas rattraper le train 1 dès lors que le signal BAL du canton 1 est fermé.
A contrario, la figure n° 39 nous montre un mauvais positionnement du contact de retombée de SEI. Nous voyons dans ce cas de figure que le train 1 a actionné le contact SEI et donc libéré l’ITN. Le train 2 a donc pu entrer sur l’itinéraire. Pour comble de malchance le train 1 est arrêté à hauteur du signal BAL fermé :

Dans cet exemple il est aisé de comprendre que nous aurons un rattrapage de T1 par T2 du fait du mauvais positionnement du contact SEI en ZC.
Conclusion
Nous voici au terme de cette présentation des itinéraires en transit rigide que j’ai voulu aussi détaillée que possible pour ceux qui ne maîtriseraient pas tout à fait EEP. Partant du principe que c’est en forgeant que l’on devient forgeron, je ne peux que vous conseiller de créer un petit réseau sur le même modèle que celui qui figure dans ces fiches et, partant de là, en suivant pas à pas les instructions de la présente fiche de construire l’automatisme avec tous les contacts dûment paramétrés.
Certains verront très vite au passage que le modèle que je propose peut être simplifié mais la formule que j’ai retenue tient compte des nécessités pédagogiques. En effet, j’ai voulu être le plus explicite possible avec une modélisation de l’automatisme développée de façon très détaillée. Il sera loisible à tout à chacun de simplifier mon modèle de base.
Je reviendrai dans un prochain article sur les simplifications à apporter. De même certains pourront s’apercevoir qu’il peut exister d’autres solutions d’automatismes mécaniques que celle que j’ai développée dans le présent document. Il existe à l’évidence de nombreux modèles possibles. A chacun de comparer les avantages et les inconvénients de chaque modèle. Pour ma part je privilégie le plus souvent la formule la moins gourmande en kilo-octets, préoccupation d’autant plus importante quand on cherche à développer des réseaux complexes.
En attendant je vous souhaite une bonne lecture et je vous invite à consulter le site EEP-World et à me poser toutes les questions que vous jugerez utiles pour une meilleure compréhension du sujet.
Cet article est à présent terminé. Si vous avez des questions ou des suggestions, n’hésitez pas à contacter François par mail.
Merci pour vos commentaires utiles. Amusez-vous à lire un autre article.
L’équipe eep-world.com.