Le transit souple dans EEP
Présentation du réseau support
Nous avons vu dans les articles consacrés au transit rigide que ce mode d’exploitation du trafic manquait précisément de souplesse car un itinéraire enclenché bloquait tous les autres itinéraires incompatibles tant qu’il n’était pas libéré en fin de parcours. C’est pourquoi les ingénieurs ont très rapidement, avec le développement du trafic ferroviaire, mis au point le transit souple permettant un écoulement beaucoup plus rapide du trafic dans une zone d’aiguillages.
Cet article propose donc de transposer dans EEP le régime d’exploitation en mode transit souple.
Le réseau support
Comme support de notre étude voici un petit réseau très simple. Définissons tout d’abord les règles d’exploitation de ce mini réseau : la circulation des trains y est à sens unique. Autrement dit, tous les trains entrent soit par l’entrée voie 1, soit par l’entrée voie 2, et ressortent en sortie 1 ou 2 selon l’itinéraire qui leur a été assigné (Fig 1) :

Important : Aucun train ne circule en sens inverse !
Dans ce dispositif les entrées 1 et 2 sont protégées chacune par un signal d’entrée d’itinéraire. Sur la voie 1 le signal défini ici comme SIG ITN A est du type 4 feux avec panneau unifié type B tandis que sur la voie 2, nous avons affaire à un signal avec rappel de ralentissement monté sur panneau unifié type G. Sur notre réseau de démonstration ce signal s’intitule SIG ITN B.
Nous verrons plus bas pourquoi nous avons implanté à chacune des entrées un signal différent. Toutefois ils présentent tous les deux un point commun essentiel, à savoir qu’ils affichent à l’état fermé le carré (double feu rouge) non franchissable de manière absolue. Ce caractère non franchissable est confirmé par la plaque Nf apposée au milieu du mât.
Le carré est ici impératif car nous entrons dans une zone d’aiguillages qui nécessite une sécurité totale pour éviter tout risque de collision entre deux trains.
Les itinéraires en présence
Pour les besoins du tutoriel et afin de ne pas alourdir les explications, nous nous sommes limités dans la figure n° 2 à deux itinéraires seulement, appelés ITN1 (par l’entrée voie 1) et ITN2 (par l’entrée voie 2) :
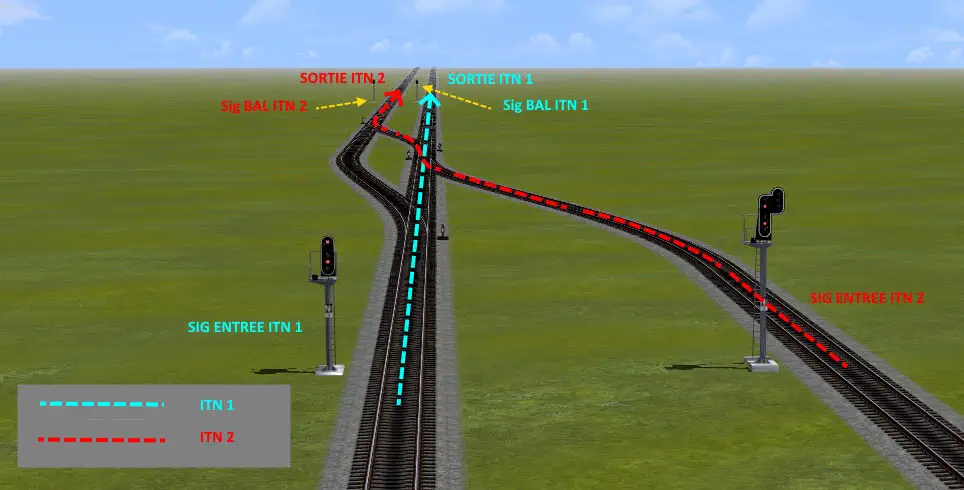
L’itinéraire ITN1 (bleu) est en tracé direct de bout en bout et ne nécessite pas, par conséquent, un ralentissement pour le franchissement d’une aiguille en voie déviée. Par contre l’itinéraire ITN2 (rouge) franchit A2 et A3 en voie déviée. Un ralentissement 30 ou 60 km/heure s’impose ce qui explique la présence du signal avec rappel de ralentissement. Le choix de la vitesse de ralentissement dépendra de l’angle en voie déviée. Si cet angle est important il conviendra alors de choisir un ralentissement à 30 km/h.
Par ailleurs, l’observation du réseau ci-dessus nous montre qu’à partir de l’entrée voie 1 deux autres itinéraires sont possibles, de même que par la voie 2 nous avons un second itinéraire possible.
Ce sont donc 3 autres itinéraires que nous n’avons pas répertoriés dans notre étude afin de ne pas l’alourdir comme nous l’avons mentionné plus haut. Le lecteur pourra à loisir reprendre ce réseau et le construire en programmant l’intégralité des itinéraires. Ce serait d’ailleurs un excellent exercice pour ceux qui ne sont pas familiarisés avec la programmation dite « mécanique » (emploi exclusif de signaux logiques ou utilisés comme tels et de contacts de voie sans aucun script Lua). J’ai appelé ce mode de programmation « mécanique » car il s’inspire fortement de la gestion électromécanique utilisée jadis avec l’emploi de relais de voie.
La figure 3 est une vue latérale droite de notre réseau de démonstration. Elle permet de visualiser le tracé des itinéraires sous un autre angle nous révélant ainsi que les aiguilles A2 et A3 (Entourées en jaune) sont communes aux itinéraires ITN1 et ITN2. Cela signifie que ces deux itinéraires sont incompatibles par rapport à ces deux aiguilles.

Dans une gestion à transit rigide l’itinéraire ITN2 (tracé rouge) n’autorisera l’enclenchement de l’itinéraire ITN1 que lorsque l’arrière du convoi aura dépassé le signal BAL en aval de A4.
En transit souple l’enclenchement de l’itinéraire ITN1 pourra être opéré dès que l’arrière du train en ITN2 aura dépassé A3.
Le tableau ci-dessous (fig 4) récapitule les caractéristiques essentielles de ces deux itinéraires 1 et 2 :

Se pose maintenant la question de savoir comment différencier dans son application pratique le transit souple du transit rigide. La réponse à cette interrogation fait l’objet du chapitre ci-dessous.
Construction d'un transit souple dans EEP
Les relais d’enclenchement d’aiguilles
Nous avons vu dans le transit rigide que l’utilisation d’un signal invisible à 2 états (arrêt – voie libre), appelé signal d’enclenchement d’itinéraire ou SEI, verrouillait un itinéraire empêchant ainsi toute exécution d’un autre itinéraire incompatible avec celui-ci. L’état voie libre indiquait que l’itinéraire n’était pas enclenché (donc libre) et à l’inverse, l’état arrêt interdisait tout enclenchement.
Dans le transit souple l’enclenchement ne se fait plus au niveau de l’itinéraire dans sa globalité mais de façon plus fine au niveau des appareils de voie utilisés.
Voyons pour cela en vue 2D la zone d’aiguillages de notre réseau avec les appareils de voie A1, A2, A3 et A4.
Chaque aiguille est doublée d’un signal invisible assurant la fonction de relais d’enclenchement d’aiguille (REA). Ainsi nous avons les correspondances suivantes :
- A1 et REA 9,
- A2 et REA 10,
- A3 et REA 11,
- A4 et REA 12.

Les 4 relais d’enclenchement d’aiguilles ont été placés en position fermée pour plus de lisibilité par rapport au fond vert.
En réalité au regard du tableau en figure 4, nous obtenons par déduction le tableau ci-dessous, avec pour chaque aiguille le signal invisible assurant la fonction de relais d’enclenchement d’aiguillages.

Ainsi pour ITN 1 nous savons que les REA 9, 10 et 11 devront être enclenchés pour assurer le verrouillage de l’itinéraire. Pour ITN 2 ce seront les REA 10, 11 et 12 qui seront sollicités.
Important : dans le cas présent où nous avons seulement 2 itinéraires, nous constatons que A1 et A4 ne sont pas des aiguillages communs aux 2 tracés. Dans ce cas nous pouvons faire l’économie des REA 9 et REA 12 pour ne pas alourdir le fichier. Si nous avions construit les 5 itinéraires possibles comme je l’ai indiqué plus haut, impérativement il nous aurait fallu placer un REA pour chaque aiguille.
Fonctionnement des relais d’enclenchement d’aiguilles
Fermeture des relais
Les signaux REA se ferment au moment de l’enclenchement d’itinéraire par l’action du commutateur mobile sur la ligne de programmation d’itinéraire. Nous verrons ce point plus bas quand nous traiterons de la structure et du fonctionnement de l’Automatisme de Gestion d’Itinéraire ou AGI (voir paragraphe 2.2.2.).
Pour l’instant comme nous sommes dans la fenêtre 2D voyons l’ouverture des relais d’enclenchement d’aiguilles.
Ouverture des relais
Les relais d’enclenchement d’aiguilles se libèrent après le passage du train. Etudions d’abord le cas de notre réseau avec un seul sens de circulation :

Les contacts de signaux REA sont placés en sortie d’aiguillage de manière à être actionnés par l’arrière du convoi quand celui-ci a quitté la zone d’un aiguillage. Ainsi dans le cercle A3 nous notons la présence de 2 contacts, soit 1 par sortie. Par contre pour l’aiguille 4 un seul contact suffit dès lors qu’il n’y a qu’un seul sens de circulation.
J’insiste bien sur le fait que nous avons affaire ici à des contacts de signaux (en l’occurrence le REA 11 pour A3 et le REA 12 pour A4).
Comme dans les zones d’aiguillages la circulation se fait le plus souvent à double sens notamment dans les faisceaux d’entrée et de sortie de gare, j’indique dans la figure 8 quel doit être le placement des contacts en sortie de zone d’aiguillages (entourés en rose). Rien de bien sorcier. Il s’agit simplement de faire preuve de bon sens :
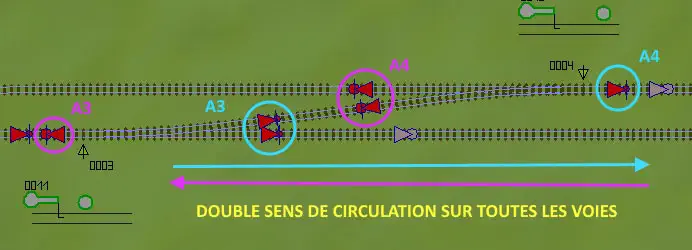
Chaque sens de circulation est matérialisé par une flèche avec une couleur appropriée. Nous retrouvons sur les voies les contacts de signaux REA, repérés par des cercles de même couleur que le sens de circulation. Comme un aiguillage simple possède 3 sorties nous aurons de même 3 contacts de signal REA par aiguillage. Ici il est important de bien définir le sens de circulation pour chaque contact REA sous peine d’avoir des fonctionnements inévitablement intempestifs.
La programmation de chaque contact sur la voie, quant à elle, ne pose aucune difficulté particulière.
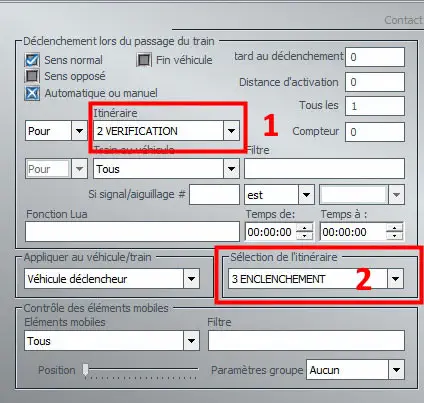
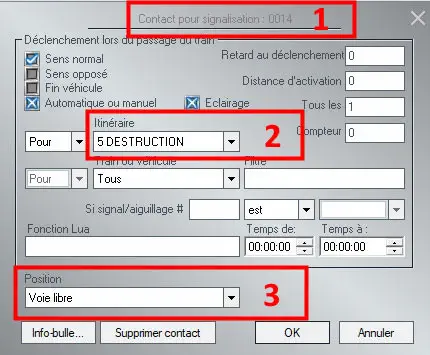
Voyons à titre d’exemple la programmation du contact de retombée du signal REA 11 couplé avec l’aiguillage A3 de notre réseau :

Les renseignements à l’intérieur des 2 encadrés rouges devront être impérativement programmés. Le sens de circulation doit être défini comme je l’ai mentionné ci-dessus. Le déclenchement devra se faire obligatoirement par la queue du train (fin véhicule) et le mode automatique activé.
Comme il s’agit de programmer une retombée du relais d’enclenchement d’aiguille, la position mentionnée dans le cartouche inférieur est obligatoirement ‘Voie libre‘, ce qui permettra de rendre l’aiguille disponible, le cas échéant, pour l’enclenchement d’un autre itinéraire.
L’automatisme de gestion des itinéraires
Schéma de principe
Si toutes les composantes d’un mécanisme d’itinéraires sont importantes, il n’en demeure pas moins que le cœur du dispositif réside dans l’automatisme proprement dit, lequel agit comme un cerveau recevant des informations venant du réseau ferré pour les exploiter et transmettre en retour vers la voie les ordres nécessaires pour assurer la bonne exploitation du trafic.
Afin que chacun se remémore bien l’articulation générale d’un système de gestion des itinéraires, je reproduis le schéma de principe tel que je l’avais inséré dans la troisième partie sur le transit rigide mais dans le cas présent adapté au transit souple :
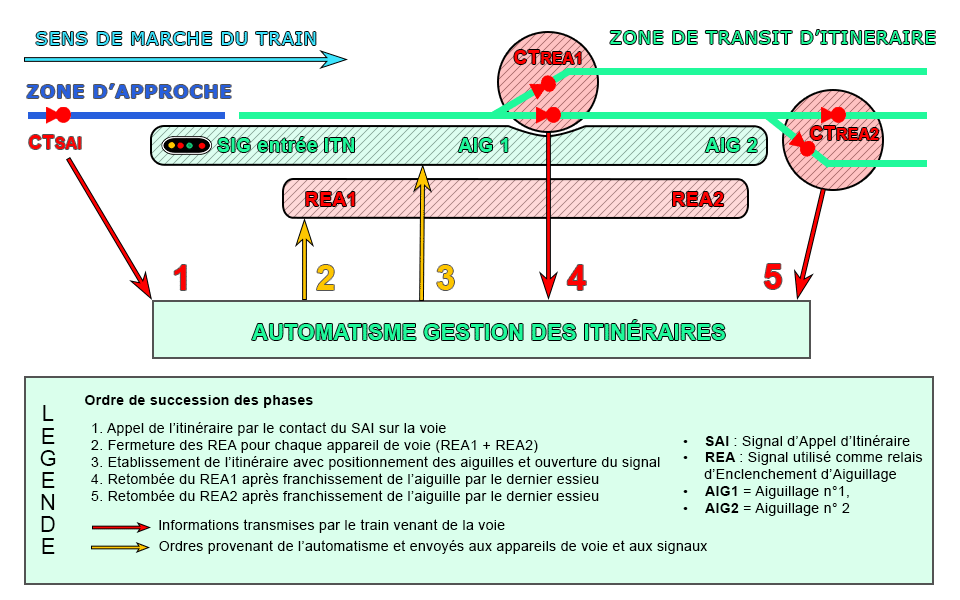
L’articulation générale demeure la même sauf que les enclenchements et destructions se font par le biais des relais d’enclenchement d’aiguillage couplés aux appareils de voie.
D’une manière générale on peut considérer que les données venant du réseau sont des informations qui seront exploitées par l’automatisme qui enverra en retour des ordres vers la voie.
Structure et fonctionnement de l’automatisme
Rappel : Les itinéraires prévus pour le CMI constituent en fait l’état dans lequel le mobile doit se trouver pour agir sur les contacts. Ce type d’itinéraire ne doit pas être confondu avec l’itinéraire des trains.
Structure
La figure 11 ci-dessous nous montre la configuration de l’automatisme construit dans le cadre de notre mini-réseau support. Ceux qui auront lu les articles consacrés au transit rigide trouveront dans ce mécanisme un air de déjà-vu :

Cette ressemblance est somme toute bien normale car s’agissant de la gestion des itinéraires les principes demeurent les mêmes et de ce fait, il n’est pas étonnant de retrouver la même structure dans son ensemble. A première vue la seule différence notable tient à la disparition des signaux d’enclenchement d’itinéraires (SEI) qui étaient placés à droite des signaux d’appel d’itinéraires (SAI) qui eux n’ont pas disparu. En effet, l’enclenchement étant opéré au niveau de chaque aiguillage grâce aux signaux REA, la présence, en théorie du moins, des SEI ne se justifie plus dans le transit souple. Néanmoins je reviendrai en fin d’article sur ce point car il peut être judicieux de conserver les SEI dans certains cas.
Ceux qui sont familiarisés avec les articles sur le transit rigide observeront quelques modifications ne présentant aucun caractère fonctionnel mais qui ont seulement pour but d’apporter plus de clarté dans l’étude des mécanismes. Ainsi j’ai retenu le terme d’établissement d’itinéraire plutôt que celui d’exécution d’itinéraire dans la mesure où, en toute rigueur, l’automatisme établit un itinéraire en positionnant de manière adéquate les aiguillages et en ouvrant le signal d’entrée d’itinéraire. L’exécution quant à elle, intervient après l’établissement de l’itinéraire lorsque le train exécute ce même itinéraire dans le sens où il va le parcourir.
Nous ne nous attarderons pas trop sur la conception de l’automatisme, longuement explicitée dans les tutoriels précédents. Je me bornerai à un simple rappel pour épargner au lecteur des allers-retours.
Dans le cas présent la première ligne d’itinéraire correspond à ITN 1 et la seconde à ITN 2. Chaque ligne est composée de segments correspondants chacun à une phase précise de la vie d’un itinéraire.
L’automatisme est parcouru en permanence par un mobile appelé « Schaltauto » en allemand, terme que nous traduisons par commutateur mobile (CM). Les segments sont reliés entre eux grâce à la fonction de connexion virtuelle dans EEP. Les lignes sont reliées de la même manière entre elles. Ainsi le commutateur mobile parcourt la ligne ITN 1 de 1 à 2, puis saute via la connexion virtuelle de 2 à 3 pour parcourir la ligne ITN 2. Au terme de cette ligne une connexion virtuelle en 4 lui permet de revenir en 1. Ce cycle est assuré de façon permanente à 400 km/h environ ce qui autorise un traitement rapide des informations et des ordres entre la voie et l’automatisme lui-même.
Le principe de fonctionnement interne du système automatique est fondé sur un échange permanent entre le commutateur mobile et les contacts placés sur les lignes d’itinéraires en jouant en particulier sur la sélection d’itinéraire du commutateur.
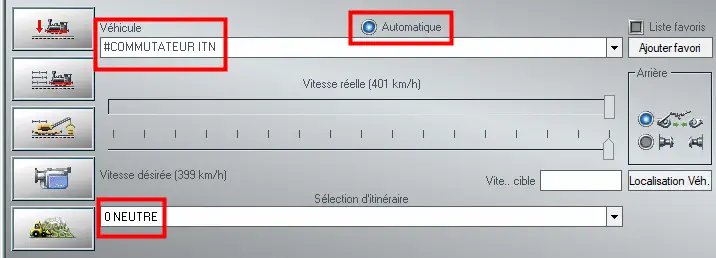
Le panneau de commande des véhicules dans la fenêtre 3D, appelé fenêtre de contrôle d’EEP, affiche en mode automatique la sélection d’itinéraire comme le montre la figure 12.
Ici, le commutateur affiche l’état ‘0 NEUTRE‘.
Dans le cas présent, on ne doit pas considérer les itinéraires du commutateur mobile (CM) comme des itinéraires au sens propre du terme mais comme des ‘états’ qui vont agir sur les contacts placés sur chaque ligne d’itinéraire. C’est pourquoi nous retiendrons désormais le terme ‘état’ en réservant celui d’itinéraire uniquement pour les différentes routes que les trains doivent emprunter sur un réseau.
Pour le bon fonctionnement de l’automatisme nous avons défini 7 états :
- 0 NEUTRE,
- 1 APPEL,
- 2 VERIFICATION,
- 3 ENCLENCHEMENT,
- 4 ETABLISSEMENT,
- 5 DESTRUCTION,
- 6 ATTENTE.
Nous constatons que ces états correspondent aux différentes phases de la vie d’un itinéraire depuis la demande d’ouverture ou appel jusqu’à sa destruction.
Ces états sont enregistrés comme pour tous les itinéraires créés par le modéliste virtuel dans l’éditeur d’itinéraires.
Nous verrons dans le détail la fonction assurée par chacun de ces états dans le paragraphe concernant la programmation des phases ci-dessous.
Fonctionnement
Le fonctionnement de l’automatisme s’appuie en particulier sur les états affichés par le commutateur mobile. Dans le paragraphe suivant, décortiquons maintenant à partir de la programmation des différentes phases, le fonctionnement interne d’une ligne d’itinéraire.
La programmation des phases
Nous prendrons comme référence l’itinéraire ITN1 pour expliciter la programmation de chacune des phases.
L'appel
Le segment d’appel comporte 2 contacts du type véhicules ici repérés avec les numéros 1 et 2 :

Contact véhicule n° 1 : Une fois que le SAI est fermé, le commutateur mobile (CM) doit prendre l’état 1 APPEL ITN quel que soit son état à l’entrée. Toutefois nous verrons que le CM sera affecté systématiquement de l’état NEUTRE à chaque sortie de ligne d’itinéraire.
Le cartouche 2 conditionne le changement d’état du CM. Si le SAI (assuré ici par le signal 13) est à l’arrêt autrement dit fermé, cela signifie que l’itinéraire ITN1 est demandé par un train sur la voie 1 :

Le commutateur mobile prend alors l’état 1 APPEL ITN pour pouvoir agir par la suite. S’il n’existe aucune demande d’itinéraire le SAI 13 sera à l’état voie libre et par conséquent le CM gardera le même état qu’à l’entrée et n’aura rigoureusement aucune action sur la ligne d’itinéraire.
Contact véhicule n° 2 : Le second contact sur le segment d’appel se borne à faire basculer le CM à l’état 2 VERIFICATION. Chacun notera ici que si le commutateur mobile est à l’état 0 NEUTRE, il ne se passera rien.

La vérification
A première vue, le second segment ne comporte que deux contacts mais en réalité, il en comporte beaucoup plus du fait de la présence d’un groupe de contacts de couleur noire (chiffre 1 sur le schéma) en fonction du nombre de relais d’aiguillages (REA) à vérifier :

En ouvrant le groupe de contacts, nous constatons ici qu’il contient 2 contacts véhicules. Chaque contact vérifie si un relais d’enclenchement d’aiguillage n’est pas déjà fermé. Cette phase est particulièrement importante car elle sera déterminante dans l’enclenchement ou non de l’itinéraire demandé :

Nous avons vu plus haut que seules les aiguilles 2 et 3 étaient communes aux itinéraires ITN1 et ITN2. Ces aiguilles étant couplées respectivement au REA 10 et au REA 11 la phase vérification va consister à s’assurer que ni le REA 10, ni le REA 11 ne sont déjà enclenchés.
Aussi ouvrons un contact véhicule afin d’en voir sa programmation :

Le commutateur mobile étant à l’état 2 VERIFICATION, il vérifie par le biais du cartouche 2 la position du REA 10. Si le signal 10 n’est pas ‘voie libre’, alors le CM prend l’état 6 ATTENTE, ce qui neutralisera toute action sur la suite de la ligne d’itinéraire comme nous le verrons plus bas.
Comme l’incompatibilité porte sur les aiguillages 2 et 3 la vérification s’applique sur les REA couplés à ces 2 aiguilles, à savoir les signaux 10 et 11.
Il est bien évident que le groupe de contacts comporte autant de contacts véhicules que de REA à vérifier. Ici nous avons délibérément opté pour un schéma simple mais dans un faisceau complexe nous pourrions avoir des itinéraires avec 10 aiguilles en commun avec d’autres itinéraires. Il y aurait dans ce cas 10 contacts véhicules programmés comme celui de la figure 17 avec évidemment un numéro propre pour chaque signal REA vérifié.
A la sortie du groupe de contacts si aucun signal REA n’était enclenché, le CM aura conservé l’état initial affiché à l’entrée du segment vérification. A l’opposé il suffit d’un seul REA fermé pour faire basculer le commutateur à l’état 6 ATTENTE.
C’est à la sortie du groupe de contacts qu’intervient le contact véhicule 2 :
De deux choses l’une : ou le CM sort à l’état 2 VERIFICATION, ce qui indique que rien ne s’oppose à l’enclenchement et l’établissement de l’itinéraire demandé, ou à l’inverse il sort à l’état 6 ATTENTE pour avoir détecté 1 ou plusieurs REA en position fermée.
Nous voyons ici que si le CM est à l’état 2 VERIFICATION il prend par le fait même l’état 3 ENCLENCHEMENT puisqu’aucune autre condition n’est imposée hormis l’état d’origine.
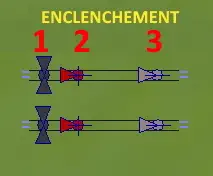
L'enclenchement
Figure 20, le segment 3 de la ligne d’itinéraire ou segment ENCLENCHEMENT comporte 3 contacts ou plus précisément 1 groupe de contacts et 2 contacts séparés (en rouge le contact SAI et violet, le contact véhicule). Comme on peut s’en douter le groupe de contacts 1 va rassembler tous les contacts REA pour permettre l’enclenchement immédiat de ces signaux. Ainsi avant même l’établissement de l’itinéraire notre ITN 1 dans le cas présent sera verrouillé et protégé :
La figure 21 nous présente une vue de la fenêtre du groupe de contacts n° 1 du segment ENCLENCHEMENT :
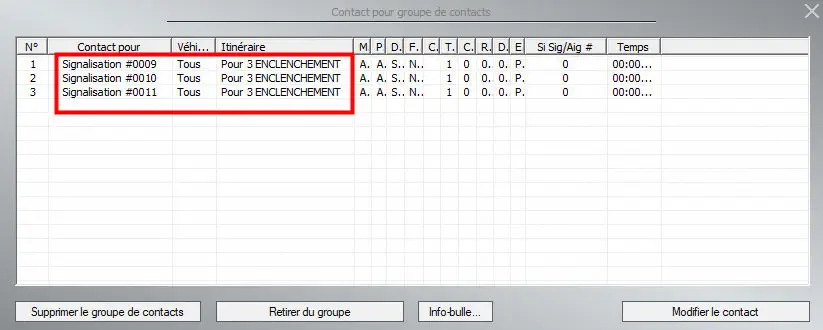
Figurent ici les contacts signaux 9, 10 et 11 correspondant aux REA assurant la protection des aiguilles 1, 2 et 3.
Dans la mesure où seuls les aiguillages 2 et 3 sont impliqués dans le conflit entre les ITN 1 et ITN 2 on pourra à juste titre s’étonner de la présence d’un contact REA 9 assurant l’enclenchement de l’aiguille 1. J’ai inséré volontairement le contact du REA 9 pour me permettre de contrôler le bon tracé de l’itinéraire dans la fenêtre radar. Cependant la présence de ce contact dans la programmation des enclenchements n’a aucun effet dès lors que la vérification pour l’ouverture de l’itinéraire ITN 2 ne prend pas en compte le REA 9 comme le montre la figure 22 ci-dessous :

La figure 22 extraite du groupe de contacts sur le segment vérification de l’itinéraire ITN 2 nous indique clairement que cette même vérification ne tient aucunement compte du REA 9. Seuls sont contrôlés les signaux REA 10 et 11 liés aux aiguilles 2 et 3 communes aux 2 itinéraires de notre réseau.
Ainsi la mise en fermeture du REA 9, propre à l’itinéraire ITN 1 n’a aucune incidence sur la programmation de l’itinéraire ITN 2.
La programmation des contacts de REA n’offre aucune difficulté. La seule condition réside dans le fait que le CM doit être impérativement à l’état 3 ENCLENCHEMENT. On se souviendra que ce même CM garde l’état 0 NEUTRE si aucune demande d’appel n’est détectée dans le premier segment ou au contraire prend l’état 6 ATTENTE si une incompatibilité est décelée à la phase vérification.
Ces 2 états neutralisent le commutateur mobile qui ne peut alors exercer ici aucune action particulière. Un oubli dans la programmation de ce contact, laissé par exemple par inadvertance à l’état « tous itinéraires » (cartouche 1), entraînerait une fermeture systématique du REA 10 et aboutirait très vite à un blocage :

Bien entendu seront regroupés et programmés de la même manière tous les contacts REA des aiguillages communs à plusieurs itinéraires.
Toujours sur ce segment de ligne ‘ENCLENCHEMENT‘ nous trouvons ensuite le contact de signal du SAI 13 actionné et fermé par le train en approche. Comme l’itinéraire a été validé, la position fermée du SAI n’a plus de raison d’être. Bien au contraire le maintien à l’état fermé conduirait à redemander la programmation de l’ITN 1 à chaque passage du CM sur le segment APPEL.
La figure 24 nous indique quels paramètres de programmation il convient d’afficher dans les cartouches 1 et 2 pour actionner le retour du SAI à l’état de repos (voie libre) :

Nous avons vu plus haut que si l’itinéraire ITN 1 ne pouvait être enclenché le CM basculait à la phase vérification à l’état 6 ATTENTE. Passant alors ici sur ce contact il ne pourrait faire retomber le SAI lequel restera fermé pour un nouvel appel au passage suivant sur le segment d’appel de la ligne d’itinéraire A.
Nous avons ici rigoureusement le même mécanisme que pour le transit rigide.
Troisième et dernier contact sur le segment d’enclenchement, le contact véhicule ainsi positionné commande le passage à l’état ‘4 ETABLISSEMENT‘.
La figure 25 nous montre que seul l’état 3 ENCLENCHEMENT du commutateur mobile autorise le passage à l’état 4 ETABLISSEMENT. Toute autre programmation de l’itinéraire dans le cartouche 1 induirait un fonctionnement intempestif dans l’exécution d’un itinéraire :

L'établissement
Cette phase consiste à créer l’itinéraire demandé en positionnant de façon adéquate les aiguilles placées sur l’itinéraire et en ouvrant le signal d’entrée d’itinéraire. Concrètement dans notre mini réseau les aiguilles 1, 2 et 3 seront positionnées en tracé direct puis le signal (SIG ITN 1) n° 5 sera ouvert en voie libre :

Le segment ETABLISSEMENT comporte 3 contacts. Ouvrons le contact de groupe 1 comme le montre la figure 27 :

Le groupe de contacts contient bien tous les aiguillages impliqués dans le tracé d’ITN 1.
Ne pas oublier ici l’aiguillage 1. Nous avons vu que A1 n’est pas partagé avec ITN 2 et que par voie de conséquence il ne fallait pas inclure REA 9 dans la phase vérification de ITN 2, ni nécessairement la programmer dans les enclenchements. En revanche, l’aiguillage 1 figure bien dans l’établissement de l’itinéraire ITN 1 et doit donc être pris en compte.
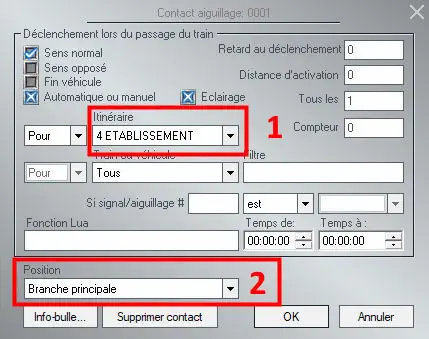
La programmation de chaque aiguille ne pose aucune difficulté.
Il importe bien évidemment, que chaque aiguillage soit programmé comme indiqué ici par la figure 28. Le cartouche 1 doit obligatoirement afficher ‘4 ETABLISSEMENT‘ sous peine de fonctionnement intempestif. La position de l’aiguille dans le cartouche 2 dépend bien sûr du tracé de l’itinéraire :
Le contact n° 2 de la figure 26 actionne le signal 5 d’entrée d’itinéraire sur la voie.
Dans la figure 29, le cartouche 1 nous indique qu’il s’agit bien du signal 5, intitulé SIG ITN 1 dans notre réseau comme nous l’avons vu au début de l’article dans la figure n° 1.
Impérativement, le commutateur mobile doit toujours être à l’état 4 ETABLISSEMENT ainsi qu’il apparaît dans le cartouche 2. Le cartouche 3 précise l’aspect du feu. Dans notre réseau le signal 5 est à l’état ‘voie libre’ :
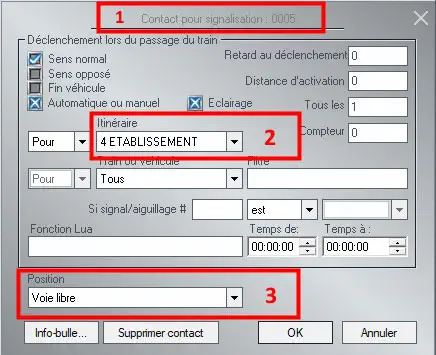
Là encore, la programmation dépendra du tracé de votre itinéraire. Ainsi pour ITN 2 le signal 6 est programmé à l’état ‘Signal d’annonce rappel ralenti 60 km/h’.
Le dernier contact du segment ETABLISSEMENT opère le passage du commutateur mobile à l’état ‘5 DESTRUCTION‘. A priori on devrait s’attendre en toute logique à trouver dans le cartouche 1 la mention de l’itinéraire ‘4 ETABLISSEMENT‘, phase qui précède la destruction :
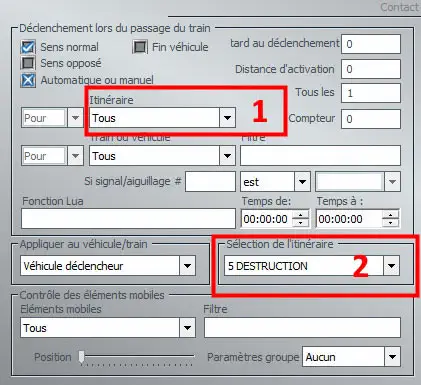
Cette logique apparente n’est, en fait, pas bonne. En effet, ce n’est que lorsque l’itinéraire est établi, que le train va y pénétrer et le parcourir. Il lui faudra un certain temps, compte tenu de sa vitesse et de la longueur de l’itinéraire.
Cela signifie qu’au moment où le train agira sur le contact de retombée du REA lié au dernier aiguillage incompatible (ici REA 11 avec aiguille 3) le commutateur mobile qui, ne l’oublions pas, parcourt les lignes d’itinéraires à près de 400 km/h sera à un endroit que l’on ne peut définir d’avance.
Par rapport au temps, la destruction d’itinéraire n’est donc pas immédiatement consécutive à celle d’établissement.
Aussi, l’état du CM pour la destruction de l’itinéraire n’a aucune espèce d’importance avant d’entrer dans le dernier segment de la ligne d’itinéraire.
La destruction
En fait la phase de destruction est opérée au fur et à mesure que le train parcourt son itinéraire en faisant retomber les REA par l’arrière du convoi. Ainsi lorsque le train sur ITN 2 aura fait retomber le REA 11 / Aiguille 3, l’itinéraire ITN 1 pourra alors s’enclencher et s’exécuter même si l’aiguille 4 n’aura pas été libérée auparavant.
Dans l’absolu cela signifie que la phase de destruction n’est pas nécessaire et que dans le cas présent le segment DESTRUCTION est pour le moins superflu.
Alors pourquoi l’avoir programmé s’il s’avère inutile ?
Ici il importe de prendre en considération l’existence ou non d’un signal d’enclenchement d’itinéraire (SEI) comme dans le cadre du transit rigide. J’ai indiqué plus haut (paragraphe 2.2.2.1 Structure) que dans le cadre du transit souple, le SEI n’était pas absolument nécessaire.
C’est la raison pour laquelle les SEI n’apparaissent pas au bout des lignes d’itinéraires dans la figure 11. Cependant je les ai installés sur mon réseau ce qui justifie la présence du segment destruction.
Nous n’entrerons pas dans le cadre de cet article sur l’utilité de la présence des SEI dans le transit souple. Disons simplement que sa présence permet une meilleure gestion du transit souple au niveau des faisceaux d’entrée en gare. Ceci fera l’objet d’un article spécialement consacré au transit en gare car intervient ici la prise en compte des arrêts en gare qui peuvent être plus ou moins longs.
Voyons néanmoins la programmation de la destruction.
Le segment destruction comporte trois contacts comme nous pouvons le voir sur la figure 31 :

Examinons d’abord le groupe de contacts 1 :

La figure 32 nous précise que 3 contacts véhicules sont englobés dans le groupe de contacts. Nous voyons dans la partie droite que les contacts exercent un contrôle sur les signaux 9, 10 et 11 qui sont les REA enclenchés pour verrouiller l’itinéraire ITN 1.
Examinons maintenant le contact véhicule n° 2 de la figure 31. Il exerce un contrôle sur le signal 10 (REA 10/Aiguille 2) comme l’indique le cartouche 2 :
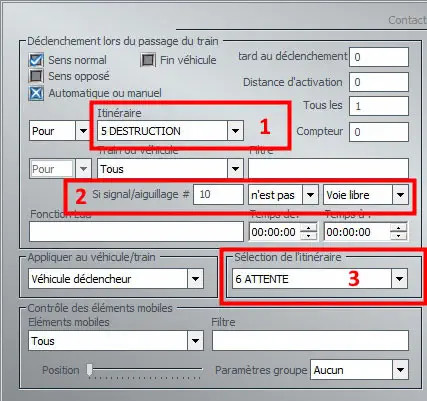
L’état ‘5 DESTRUCTION‘ constitue la condition impérative pour que le contrôle s’effectue.
Ici la condition est une condition ‘n’est pas’. Si effectivement le REA 10 n’est pas en voie libre cela signifie que l’aiguille 2 qui lui est associée est toujours enclenchée. Si cette condition est réalisée, le CM prendra alors l’état « 6 ATTENTE », ce qui lui interdira toute action sur le contact suivant.
Il suffit que la condition ‘n’est pas‘ ne se réalise qu’une seule fois, quel que soit le nombre total de contacts véhicules dans le groupe, pour que l’état du CM soit commuté au ‘6 ATTENTE‘.
Le contact 2 du segment DESTRUCTION est un contact du signal d’enclenchement d’itinéraire (SEI) 14 (cartouche 1).
La retombée de tous les REA fait que l’état ‘5 DESTRUCTION‘ s’est maintenu. Cet état agit maintenant sur le SEI qui retombe à la position voie libre. Autrement dit l’itinéraire n’est plus enclenché.
Nous arrivons au terme de la ligne d’itinéraire ITN 1. Avant que le commutateur mobile ne saute sur la ligne ITN 2, il convient de le remettre à l’état ‘0 NEUTRE‘ :

Le contact véhicule 3 du segment DESTRUCTION assure cette fonction. Comme il peut, au moment d’arriver sur ce contact, être dans des états différents aucune condition d’itinéraire ne figure dans le cartouche 1 ce qui implique que le CM sortira toujours à l’état neutre.
Nous sommes arrivés au terme de l’étude du transit souple à partir d’un modèle de réseau simple mettant en œuvre 2 itinéraires ce qui est déjà amplement suffisant pour permettre une bonne compréhension du sujet.
Dans un prochain article nous compléterons cette étude en montrant comment établir un tableau d’incompatibilités d’itinéraires en prenant en compte les aiguilles de chacun des itinéraires.
En outre, nous verrons la gestion des itinéraires avec SEI en zone de gare. Rassurez-vous, ce point particulier ne remettra pas en cause ce que nous avons étudié tout au long de cet article sur la structure de l’automatisme et sa programmation interne. Il donnera simplement une pleine justification de la présence du segment destruction sur les lignes d’itinéraires.
Conclusion
D’ici là je ne peux que vous inciter à construire un réseau similaire à celui que nous avons utilisé ici comme support ou à créer le vôtre. Ne soyez pas gourmands au début. Faites un réseau simple avec 3 ou 4 itinéraires au maximum. C’est suffisant pour apprendre mais aussi pour commettre des erreurs. J’en commets à chaque fois car c’est quasiment inévitable. Vous commettrez, soyez-en certains, vous-mêmes des erreurs. Cela arrive systématiquement compte tenu du nombre de paramètres à établir pour chacun des contacts. Plus le nombre d’itinéraires est important, plus il y aura d’aiguillages et par voie de conséquence plus grand sera le nombre de contacts à paramétrer. Le plus difficile sera alors de localiser l’erreur pour la corriger, surtout quand on est débutant. Avec l’expérience on finit par identifier le plus souvent la localisation et la nature de l’erreur, mais parfois la débusquer demeure une tâche difficile. C’est la raison pour laquelle je vous recommande de travailler au début sur un réseau modeste.
Bon courage à tous et à bientôt !
Cet article est à présent terminé. Si vous avez des questions ou des suggestions, n’hésitez pas à contacter François par mail.
Merci pour vos commentaires utiles. Amusez-vous à lire un autre article.
L’équipe eep-world.com.